Control System Design For Electrical Stimulation In Upper Limb Rehabilitation

Article A Neuromuscular Electrical Stimulation Nmes And Robot Hybrid System For Multi Joint Coordinated Upper Limb Rehabilitation After Stroke Full Text Neuromuscular Rehabilitation Stimulation

Web Site Restorative Therapies Xcite Fes System Receives Ce Mark Rehab Managment Fes Therapy System
Pdf Rehabilitation With Functional Electrical Stimulation In Stroke Patients

Article The Effect Of An Upper Limb Rehabilitation Robot On Hemispatial Neglect In Stroke Patients Full Text Robot Investigations

Neuromuscular Electrical Stimulation For Quads Neuromuscular Stimulation Quad Muscles

Article Automated Functional Electrical Stimulation Training System For Upper Limb Function Recovery In Poststroke Patients Full Text In 2020 Stimulation Intervention Show Control Theory
Springer international publishing 192pp.
Control system design for electrical stimulation in upper limb rehabilitation.
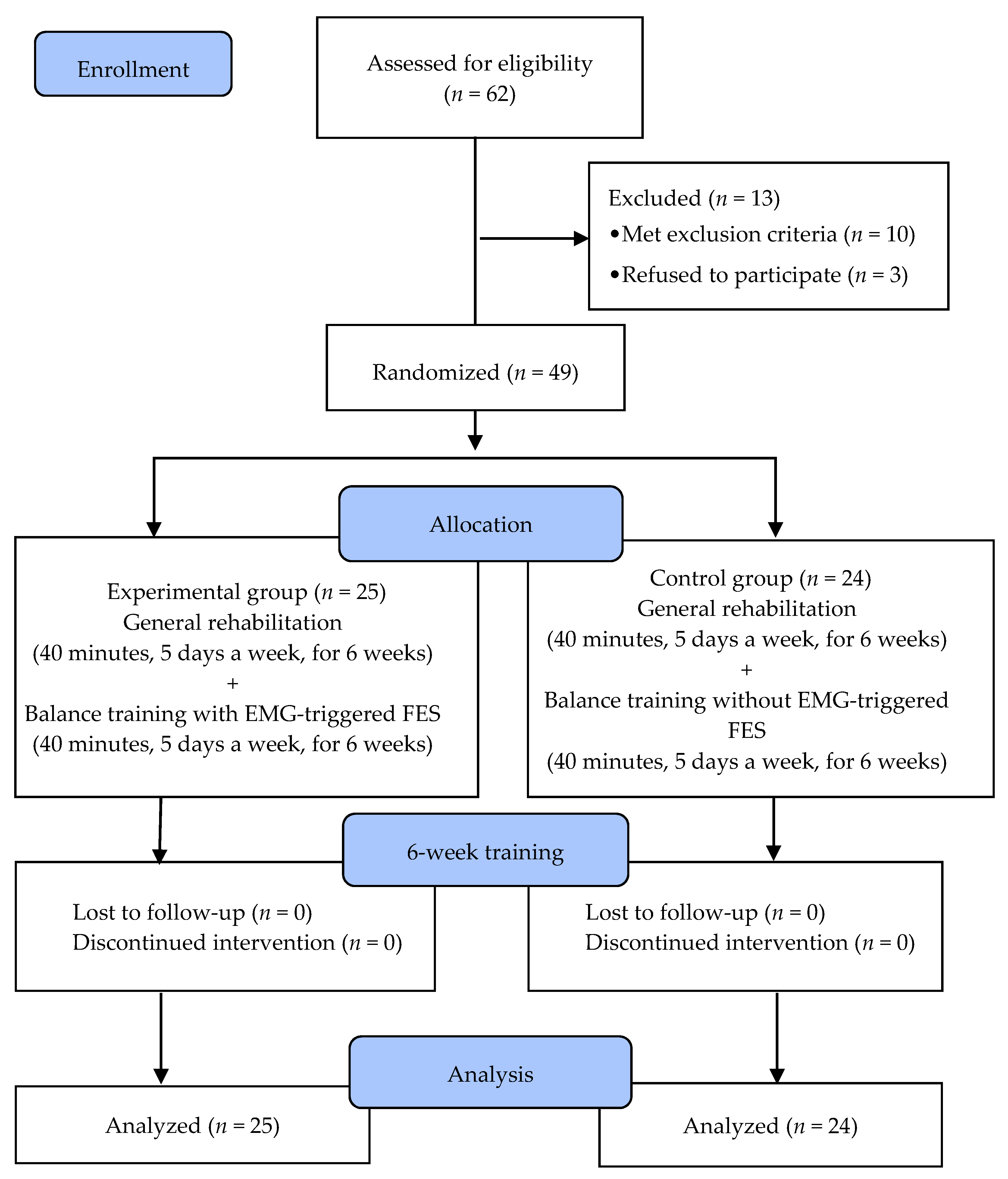
Brain Sciences Free Full Text Balance Training With Electromyogram Triggered Functional Electrical Stimulation In The Rehabilitation Of Stroke Patients Html
Pdf Neuromuscular Electrical Stimulation For Skeletal Muscle Function

Electrode Placement Guidelines Tens Electrode Chart Medi Stim Inc Tens Electrodes Tens Electrode Placement Tens Unit Placement

Electrode Placement Chart Tens Electrode Placement Tens Electrodes Tens Unit Placement
Source : pinterest.com
